




Crean en Madrid un robot para recolectar fruta en los invernaderos
- Ahora toca someterlo a las pruebas que validen si el proyecto es comercializable o no
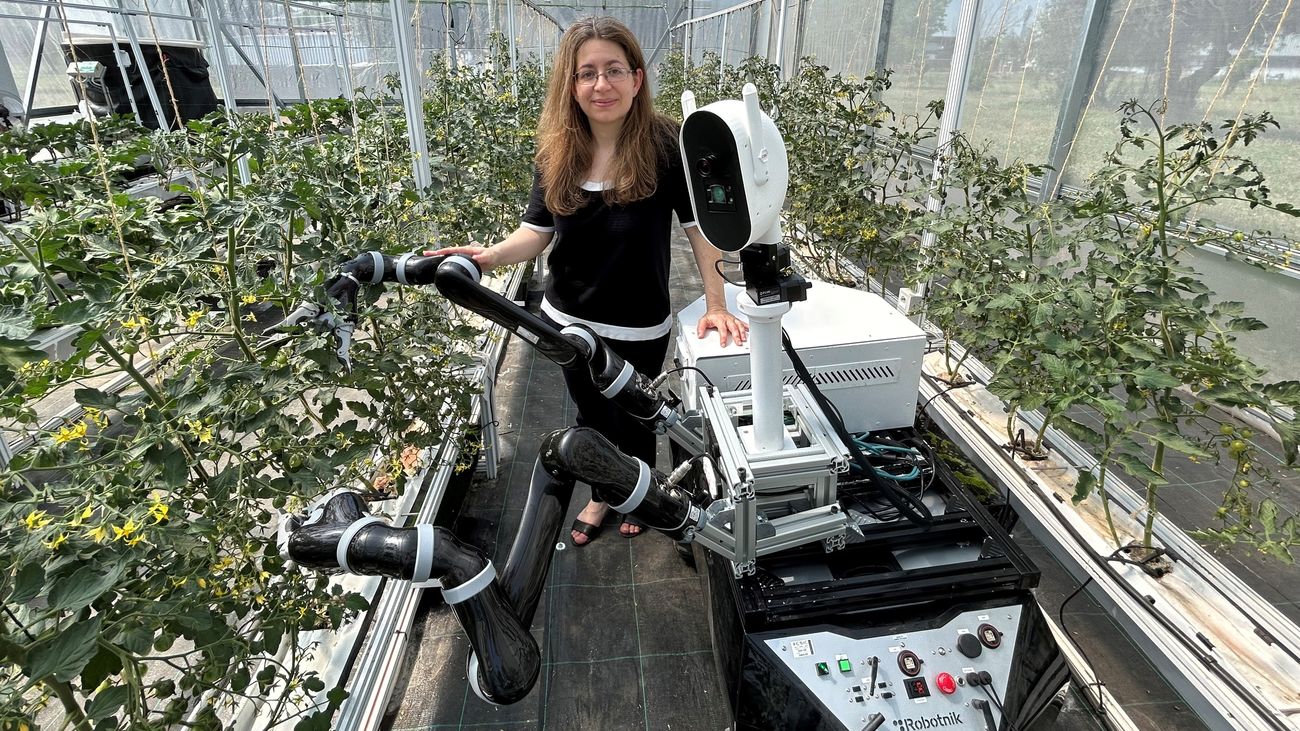
¿Puede un robot trabajar en un invernadero, entre las múltiples formas que adquieren los vegetales, seleccionar el fruto idóneo y cogerlo con sus manos sin espachurrarlo o dejarlo caer?. La pregunta no es sencilla y el nombre del proyecto tampoco: PoCROBOCROP.
El Proyecto PoCROBOCROP es una iniciativa del Grupo de Robótica de Exteriores y de Servicios del Centro de Automática y Robótica del Consejo Superior de Investigaciones Científicas-Universidad Politécnica de Madrid (CSIC-UPM).
Fue seleccionado dentro de la convocatoria de ‘Pruebas de Concepto 2021’ y recibió una financiación de 138.000 euros por parte de la Agencia Estatal de Investigación.

Un robot con tecnología española limpia de plásticos los canales de Venecia
Esa Prueba de Concepto a la que se va a someter el robot va a testar su validez técnica y comercial antes de lanzarlo al mercado.
“Teniendo en cuenta la creciente demanda de frutas y verduras a nivel mundial, las dificultades para encontrar trabajadores en el sector agrícola y el progresivo aumento de los costes laborales, podemos afirmar que los resultados de este proyecto contribuirán a mejorar la eficiencia, la sostenibilidad y la competitividad de la industria agrícola española”, afirma Roemi Emilia Fernández Saavedra, científica titular en el Grupo de Robótica de Exteriores y de Servicios del Centro de Automática y Robótica CSIC-UPM e investigadora principal de PoCROBOCROP.

¿Adiós repartidores? Los robots autónomos llegan a España y están a prueba en Alcobendas
Fernández Saavedra explica que “la mayoría de las actividades de recogida selectiva requieren del uso de los dos brazos, por eso era fundamental que nuestro robot fuese capaz de reproducir de forma natural los movimientos propios de la manipulación humana"
Los creadores han utilizado algoritmos con técnicas de inteligencia artificial para percibir el entorno y tomar las decisiones oportunas en la recolección.

El hospital de Sanchinarro logra una doble cirugía robótica pionera en el mundo
Con esa programación, el robot podrá primero percibir el entorno y decidir qué frutas recolectar, las trayectorias que seguirán los brazos y la orientación del agarre, en función del estado del sistema y de la información proporcionada por los algoritmos de percepción. Luego, los algoritmos de control se encargarán de la correcta ejecución de los movimientos, aclara Fernández Saavedra.
“También hemos probado el uso de garras fabricadas a partir de materiales deformables para minimizar el daño en los productos durante el agarre y facilitar la adaptación del sistema robótico a diferentes tipos de cultivos”, añade.
Gracias a la Prueba de Concepto se están llevando a cabo mejoras de software y hardware necesarias para validar el sistema robótico en un invernadero hidropónico. También se ha podido realizar un estudio para solicitar una patente y analizar la viabilidad de la tecnología propuesta y llevar a cabo un modelo de negocio.